Local Motion Planning Benchmark Suite
This repository is meant to allow quick comparison between different local motion planning algorithms. Running and postprocessing is available and we aim to offer a nice interface to implement a wrapper to your own motion planner.
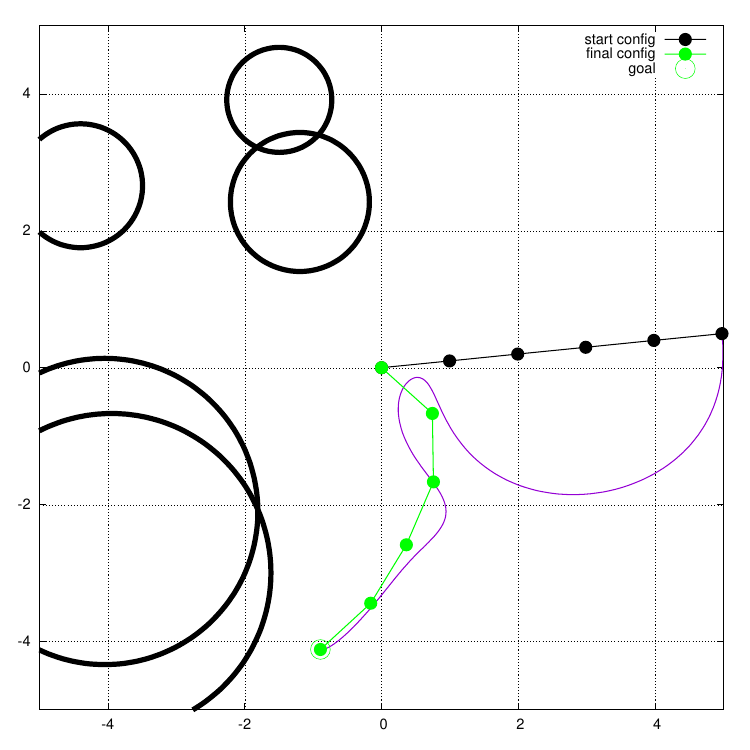
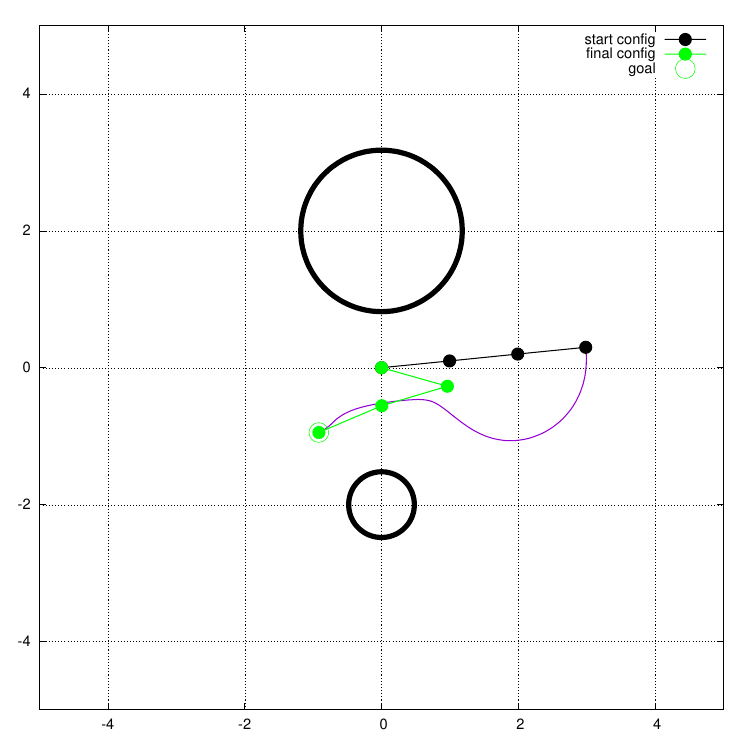
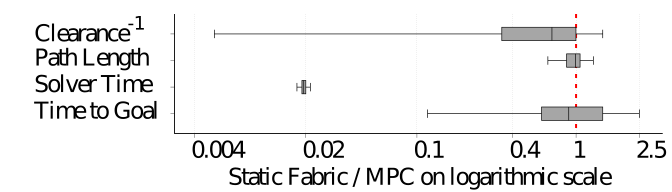
Screenshots