Structure
This repository provides essentially two executables to
Run an experiment
Postprocess the results of an experiment.
The users are able to provide their own planner and compare it with the provided executables.
Here, the underlying structure is explained so that additional planners and metrics can be easily added.
Overview
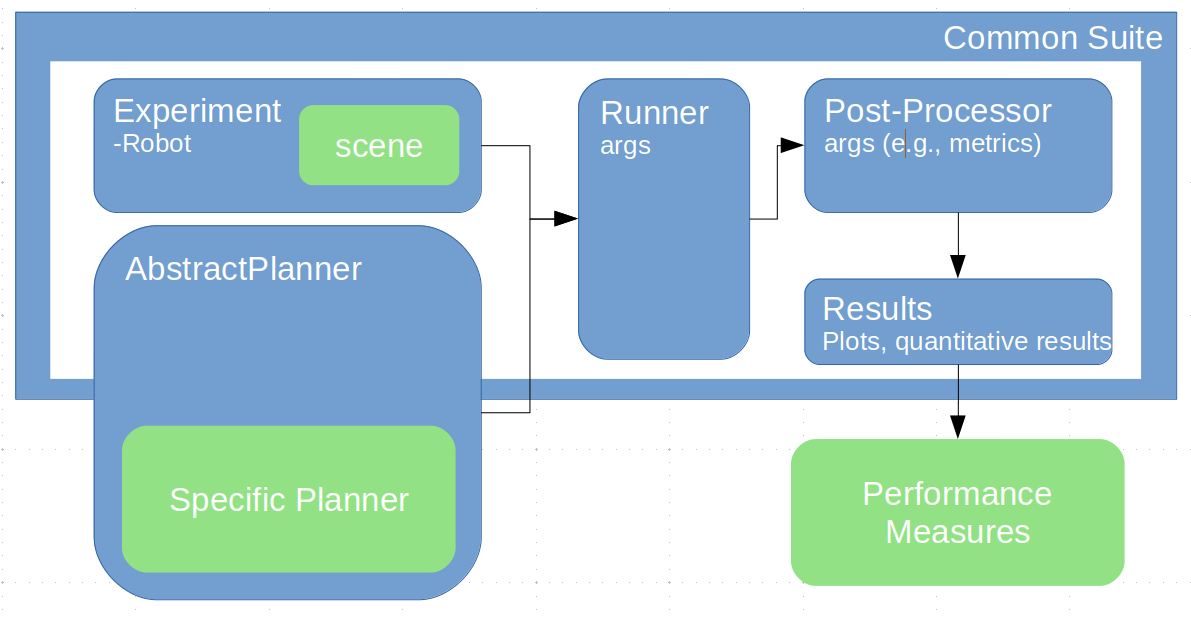
Experiment
The experiment sets all the parameters of the experiment, such as time step, robottype, etc. It also parses the configuration file of the experiment, typically exp.yaml. This configuration file contains the scene, that means the goal, obstacles and other constraints to the motion planning problem. Objects are taken from Motion Planning Scenes.
Planner
The AbstractPlanner provides a blueprint for local motion planners that every planner must inherit from. It also sets some abstract methods, which must be provided by any planner.
Runner
Both components are combined in the runner. It passes necessary information from the experiment to the runner, such as obstacles and goals. It also initiates the simulation environment and enables or disables the logger.
Logger
The logger tracks the entire experiment at runtime and produces a summary of the run in a time-stamped folder. For each run, a new folder with the name ‘plannerName_timeStamp’ is created. In there, you will find a csv-file with all the important results, such as taken action, robot state information, goal positions, obstacles position and planning times.
PostProcessing
Using the results folder created by the logger, the postProcessor allows to evaluate the metrics and create plots to eventually evaluate the performance of an individual local motion planner.